// EXPERTISE 03
Systèmes Autonomes.
L’intelligence confrontée à la physique. Algorithmes de contrôle, navigation et planification de trajectoires pour transformer vos machines en agents adaptatifs.
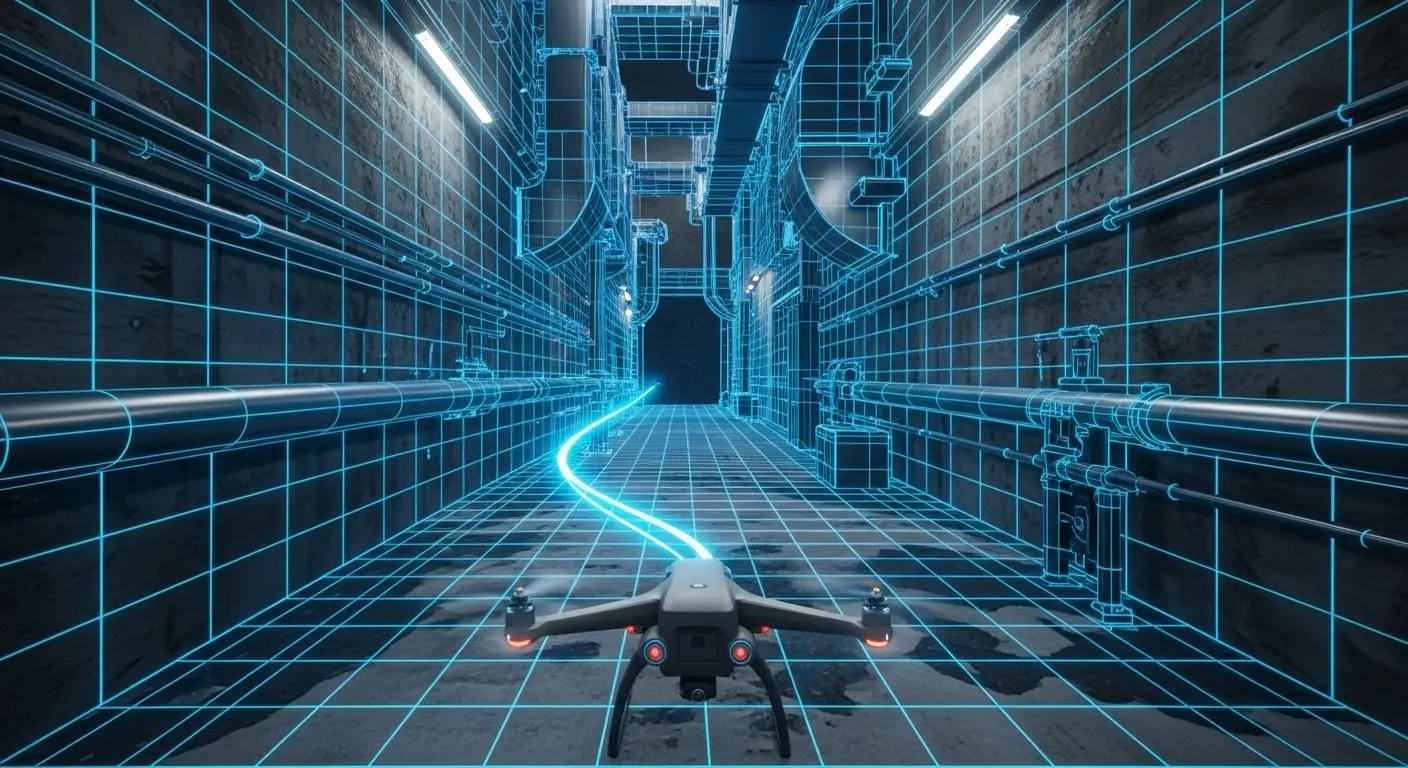
Navigation & ROS 2
Au-delà du simple suivi de ligne. Nous implémentons des stacks de navigation robustes pour l’évolution en milieu dynamique et non structuré.
- Middleware ROS 2 optimisé pour la communication temps réel.
- Cartographie et Localisation Simultanées (SLAM) par Lidar/Vision.
- Planification de trajectoire intelligente et évitement d’obstacles.
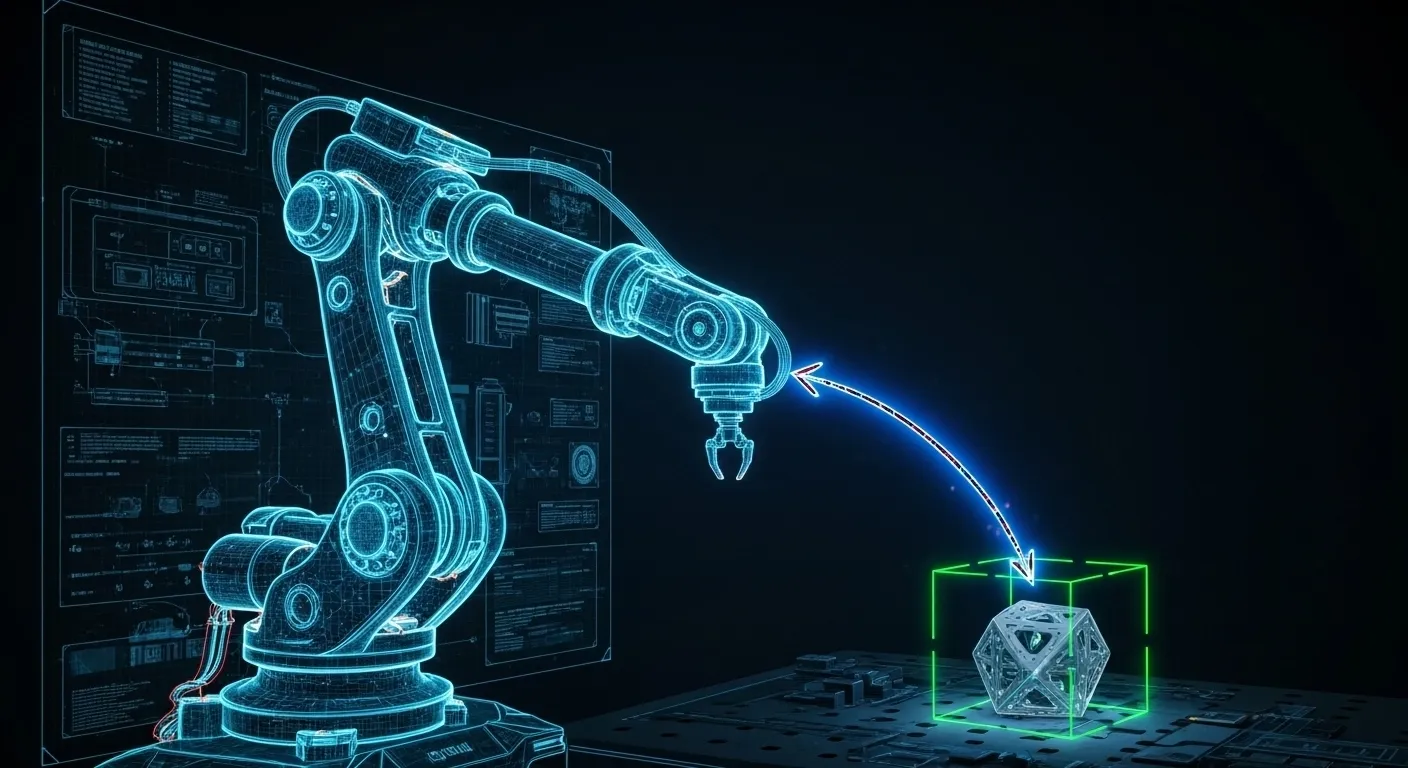
Contrôle & Manipulation
La précision du geste. Intégration de bras manipulateurs et d’effecteurs pour l’interaction physique avec l’environnement.
- Cinématique inverse et planification de mouvement (MoveIt).
- Servoing visuel (contrôle guidé par caméra).
- Couplage base mobile + bras (Mouvement coordonné).